Revolutionize Your Business with Machine Hub Software! Learn More


:quality(75)/machine-listing-images/f14bc21be7eaeed046fed206a492e652-7ea57a642857dde53385c8190a227621.jpg)
:quality(75)/machine-listing-images/2c137536637deec82a748145a1f83e8d-746611ee86fbc5a912f088b7c6f78dd0.jpg)
:quality(75)/machine-listing-images/0dd47af72a68ec92fc74293c917a5abb-cd0cd4f2b845a2cf622ac08c6fe4d118.jpg)
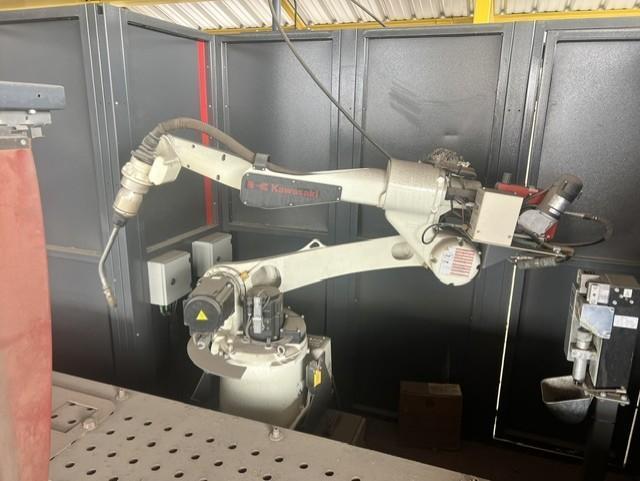
Sumig III Robotic Arc Welding Cell, 2020 – Kawasaki BA006L Robot
Brand
Not specified
Category
Type
Model
III
Stock #
134701
Year
2020
Condition
Not specified
Location
Not specified
|
Ready-To-Weld Robotic Arc Welding Cell
Robot: Kawasaki BA006L Through-Arm Cable Arc Welding Robot
Welding Process: MIG/MAG Arc Welding
Configuration: Robotic welding cell with safety enclosure
All specifications are assumed to be correct but must be confirmed by the purchasing entity.,Kawasaki BA006L Robot Axes: 6 Max Payload: 6 kg (13.2 lbs) Max Horizontal Reach: 2,036 mm (80.2″) Repeatability: ±0.08 mm Robot Mass: 160 kg (353 lbs) Mounting: Floor or Ceiling Wrist Type: Hollow Through-Arm Cable Routing Axis Motion Range: JT1 (Arm Rotation): ±165° @ 210°/s JT2 (Lower Arm): +150° / –90° @ 210°/s JT3 (Upper Arm): +90° / –175° @ 220°/s JT4 (Wrist Roll): ±180° @ 430°/s JT5 (Wrist Pitch): ±135° @ 430°/s JT6 (Wrist Rotation): ±360° @ 650°/s All specifications are assumed to be correct but must be confirmed by the purchasing entity.,Kawasaki E01 Controller Digital I/O: 32 Inputs / 32 Outputs Interfaces: 3× USB 2.0, 2× Ethernet, 2× RS232C Dimensions: 580 × 550 × 170 mm Weight: 40 kg Power Supply: 3-Phase, 380–415VAC ±10%, 50/60Hz Safety Category: Category 4, Performance Level e (EN ISO 13849-1) All specifications are assumed to be correct but must be confirmed by the purchasing entity.,Welding Torch Capacity: 350A / 500A Cooling: Air or Water Cooled Cable Routing: Internal through-arm All specifications are assumed to be correct but must be confirmed by the purchasing entity. |
No files or videos to display